Modified Gradient Flow Method for Solving One-Dimensional Optimal Control Problem Governed by Linear Equality Constraint
Keywords:
Optimal Control, Gradient Flow, three-level splitting parameters, discretization scheme, linear and quadratic convergenceAbstract
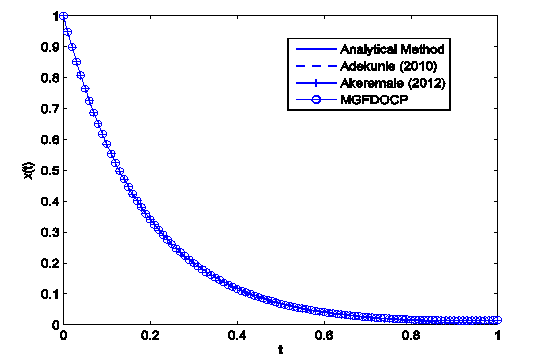
This study presents a computational technique developed for solving linearly constraint optimal control problems using the Gradient Flow Method. This proposed method, called the Modified Gradient Flow Method (MGFM), is based on the continuous gradient flow reformulation of constrained optimization problem with three-level implicit time discretization scheme. The three-level splitting parameters for the discretization of the gradient flow equations are such that the sum of the parameters equal to one (\theta1 + \theta2 +\theta3=1). The Linear and quadratic convergence of the scheme were analyzed and were shown to have first order scheme when each parameter exist in the domain [0, 1] and second order when the third parameter equal to one. Numerical experiments were carried out and the results showed that the approach is very effective for handling this class of constrained optimal control problems. It also compared favorably with the analytical solutions and performed better than the existing schemes in terms of convergence and accuracy
Published
How to Cite
Issue
Section
Copyright (c) 2022 Journal of the Nigerian Society of Physical Sciences

This work is licensed under a Creative Commons Attribution 4.0 International License.